实验二
实验名称:机构动平衡与运动参数测定
实验简介:通过本实验学生能够学习铰链四杆机构和对心曲柄滑块机构实现动平衡的原理和常用方法,以及常用机械量测试的基本原理和方法,传感器和测试仪器的工作原理及使用方法,相关的测试分析理论与方法。对一般实验装置能够进行调试操作,具备对实验结果的数据处理能力及其与理论计算结果的分析与比较的能力。
实验目的:A掌握曲柄摇杆机构和曲柄滑块机构实现动平衡的原理和常用方法;B了解机构运动参数测试系统的基本硬件组成;C了解常用机械量(线位移、角位移、转速、机座振动加速度)的测试方法;D通过工程测试,定量了解铰链四杆机构和对心曲柄滑块机构的运动特性;E了解传感器的工作原理、用于信号采集和分析的专业软件。
适用课程: 机械原理
面向专业: 机械类
实验项目性质:综合性实验(课内必做/课外开放)
计划学时: 2学时
实验要求:A预习《机械原理》、《微机原理》及《测试技术》等课程的相关知识点内容;B预习《机械原理实验指导书》中实验目的、原理、设备、操作步骤或说明,并写出预习报告;实验前没有预习报告者不能够进行实验;C进行实验时衣着整齐,遵守实验室管理规定、学生实验守则、仪器设备操作规定等相关规定,服从实验技术人员或实验教师的指导与管理。
知识点:A机构动平衡原理(平衡方法、平衡配重及相位角计算);B机构运动参数测定方法(构件速度、振动加速度、位移、角位移);C测试技术(测试系统、传感器、信号放大、数据采集);D微机原理(数据采集卡构成原理、A/D、D/A转换);E操作技能(实验台机构及平衡配重块的安装、测试软件操作);F实验分析技能(数据对比、误差分析)。
开放地点:教一楼——225室(机构动平衡实验室)
开放办法:先登陆网站进行网上预约或到实验室填写预约表进行预约,根据预约时间提前预习写出预习报告、进行实验。
开放时间:以网上公告或实验室时间安排为准
实验分组: 3人/组
实验照片:

实验二机构动平衡与运动参数测定
通过本实验学生能够学习铰链四杆机构和对心曲柄滑块机构实现动平衡的原理和常用方法,以及常用机械量测试的基本原理和方法,传感器和测试仪器的工作原理及使用方法,相关的测试分析理论与方法。对一般实验装置能够进行调试操作,具备对实验结果的数据处理能力及其与理论计算结果的分析与比较的能力。
一、实验目的
1.掌握曲柄摇杆机构和曲柄滑块机构实现动平衡的原理和常用方法;
2.了解机构运动参数测试系统的基本硬件组成;
3.了解常用机械量(线位移、角位移、转速、机座振动加速度)的测试方法;
4.通过工程测试,定量了解铰链四杆机构和对心曲柄滑块机构的运动特性;
5.了解传感器的工作原理、用于信号采集和分析的专业软件。
二、实验内容
1.根据给定的机构参数计算所要添加平衡块的质量和相位;
2.安装平衡块,测试机构平衡后的机架水平方向振动加速度;
3.不装平衡块或随意添加平衡块,测试机构不平衡时的机架水平方向振动加速度;
4.测试曲柄转速、摇杆角位移或滑块线位移。
三、实验仪器设备
1.曲柄滑块机构实验台和曲柄摇杆机构实验台各一套(含线位移传感器、角位移传感器、旋转编码器、压电加速度传感器);
2.扇形平衡块若干;
3.电子台称(精度0.1克);
4.计算机测试系统(JXCRAS V5.1随机信号分析系统)。
(1)硬件系统
计算机(Cerelon 633Hz SDRAM 128M HDD 20G);DC12伏直流电源;
A/D44四通道数据采集卡;KD5002电荷放大器;R03角位移变送器。
(2)软件系统
Windows98操作系统;CRAS V5.1随机信号振动分析软件;Word 2000等。
四、实验要求
1.预习《机械原理》中有关机构动平衡章节的内容,以及《微机原理》、《测试技术》等课程的相关知识点内容;
2.预习《机械原理实验指导书》中实验目的、原理、设备、操作步骤或说明,并写出预习报告;实验前没有预习报告者不能够进行实验;
3.学习《测试技术》中有关传感器工作原理的内容;
4.实验中服从实验技术人员或实验教师的指导与管理,爱护实验仪器和设备,注意安全;
五、实验原理
1.机构的平衡原理
对于机构中作往复运动和平面复合运动的构件,在运动中产生的惯性力和惯性力矩不能在构件本身加以平衡,而必须对整个机构进行平衡,设法使各运动构件惯性力的合力以及合力偶达到完全的或部分的平衡。
平衡的方法有:利用对称机构平衡、利用平衡质量平衡、利用非完全对称机构平衡、利用弹簧平衡等。本实验采用的是利用平衡质量平衡法对曲柄滑块机构和曲柄摇杆机构进行机构动平衡实验。
机构平衡的条件是:通过机构质心的总惯性力FI和总惯性力偶矩MI分别为零,即:

(1)利用平衡质量对曲柄滑块机构进行不完全平衡
如图2-1所示,m′= mBLAB/r用来平衡等效到B点的质量mB产生的离心惯性力FIB;m〞=k·mCLAB/r用来部分平衡C点的质量mC产生的往复惯性力FIC。
为了再增加平衡配重m〞时引入的新的对机构不利的垂直方向的惯性力分量不是很大,因此添加系数k=1/3~1/2,使得C点的质量mC产生的往复惯性力FIC部分平衡,平衡效果更好。
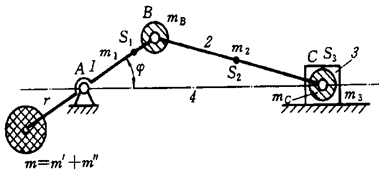
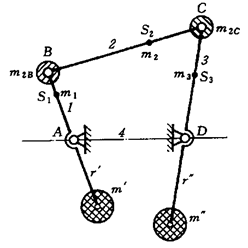
图2-1 曲柄滑块机构 图2-2曲柄摇杆机构
(2)利用平衡质量对曲柄摇杆机构进行完全平衡
如图2-2所示,m′= (m2BLAB+m1LAS1)/r′使构件1的质心S1移到固定轴A处;m〞=m2LBS2/LBC使构件1的质心S1移到固定轴D处;此时,机构的总质心S应位于AD线上一固定点,即:as=0,机构的惯性力得到完全平衡。
2.机构运动参数的测定
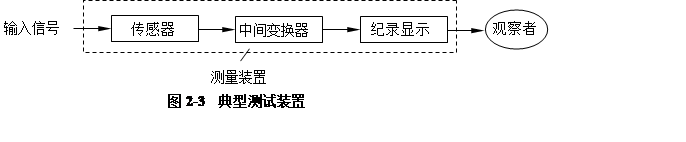
(1)测量装置
任何物理量的测量装置,往往由许多功能不同的器件所组成,典型的测量装置如下图2-3所示。
 (2)测试系统
(2)测试系统
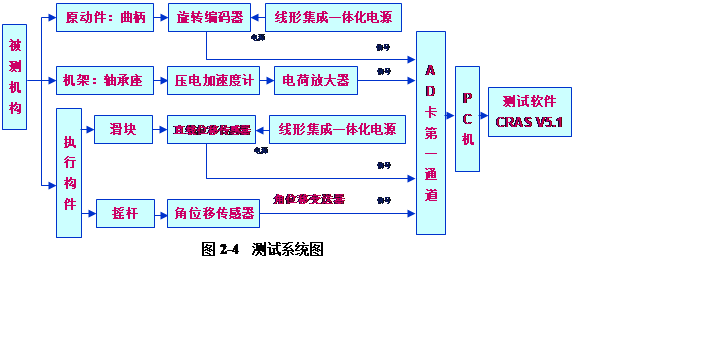 本实验系统的测试原理如下图2-4所示。
本实验系统的测试原理如下图2-4所示。
六、实验步骤、现象描述及结果分析:
1.机构动平衡计算及机架水平方向振动加速度测量
 (1)平衡块质量和相位的计算
(1)平衡块质量和相位的计算
根据教学大纲的要求,本次实验仅考虑采用静代换法对机构进行动平衡。有关的平衡原理可以学习教材中的相关章节,在此不再重复。有关更深层次的知识可以参考相应的书籍。
各机构的详细参数如下:
①曲柄滑块机构:
LAB=47mmLBC=276mmr=74mm LAS1=22.2mm LBS2=138mm
m1=218克m2=221克m3=392克
②曲柄摇杆机构:
LAB=65mmLBC=275mmr’=74mm LAS1=35mm LBS2=137.5mm
LCD=122mm LDS3=72mmr”=74mm
m1=285克m2=384克m3=410克
2.机构动平衡实验和机架在水平方向振动加速度的测量
(1)实验原理
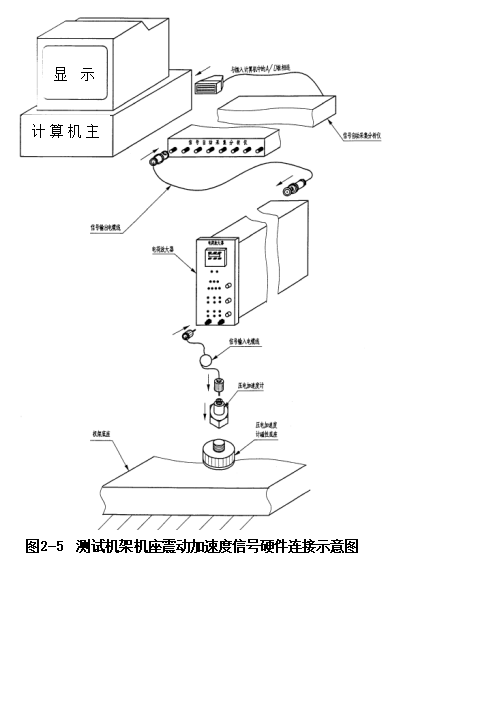
对于平面四杆机构的力学本质属于一个二自由度的振动系统,其不平衡现象在水平方向表现得尤为突出。我们主要通过测量机架在水平方向的振动加速度来衡量机构平衡的效果。测量加速度用的是压电加速度传感器,它将加速度信号转换为与之成比例的电荷信号,经放大并换为电压信号后在送AD44数据采集卡。试验使用的加速度传感器有四个,其编号分别为:110、111、112、113,对应的校正因子分别是:2.1mV/ms2、、2.22mV/ms2、2.27mV/ms2、2.24mV/ms2。
(2)实验步骤
硬件联接:
①根据给定的机构参数尺寸,计算出所要添加平衡块的质量和相位;
②利用磁性底座将加速度传感器安装在曲柄回转中心的轴承座上;
③将加速度传感器的引出线接到电荷放大器的输入端;
④将电荷放大器的输出信号线接到AD44数据采集卡的第一通道;
⑤连接完毕,检查无错后,设置电荷放大器的“灵敏度系数”、“程控放大倍数”和通带频率的上限、下限值。
软件参数设置:
①运行JXCRAS V5.1应用程序,选择机械基础实验项目下的“机构动平衡的试验测定JX04”;
②分别在菜单栏的“加速度计灵敏度”,“采样频率”菜单项下,设置相应的测量参数;
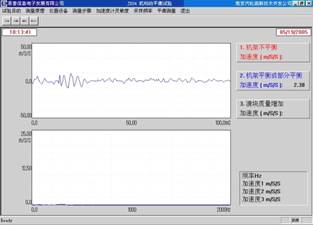
③在“平衡测量”主界面下单击‘机架不平衡加速度’进行测量;
④测量完毕单击“退出”菜单项退出。
(3)机架水平方向振动加速度测量
①观察并测量未添加平衡块时机架的振动情况及其水平振动加速度;
(测量得到的曲线可用屏幕硬拷屏的方法保存成BMP图像)。
②观察并测量添加平衡块后机架的振动情况及其水平振动加速度;
③改变平衡块的质量和相位,再观察并测量机架的振动加速度;
2.机构运动参数的测定
(1)曲柄的转速测量
① 测量原理
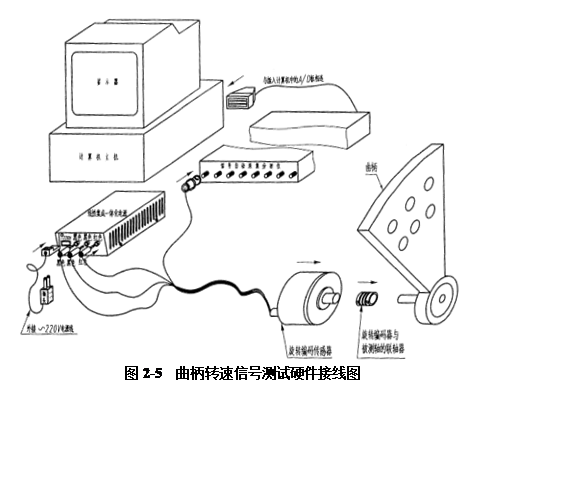
实验中使用旋转编码器测量转速,旋转编码器与实验台的曲柄联结在一起,与曲柄同步旋转。曲柄每转过一转,旋转编码器发出100个完整的脉冲信号。通过测量单个脉冲的周期即可以测得曲柄的转速。旋转编码器外部引出线有四根,红色香蕉插头为电源正极,两个黑色香蕉插头分别为电源零点和信号输出负,及信号输出线。在使用时要将其电源线与直流电源的极性正确连接,信号线连接到AD44数据采集卡。
② 测量步骤
硬件联接:
ⅰ将旋转编码器引出线的红色香蕉插头、两黑色香蕉插头分别与直流电源的红色香蕉插座和两黑色香蕉插座对接。
ⅱ旋转编码器的信号线与AD44数据采集卡上端的第一通道相连。
提示:将信号线头插入AD44数据采集卡上的通道时,以信号线头的缺口方向插入后,再行右旋;退出时,先行左旋,再拔出信号线头。
ⅲ测试系统连接完毕,并检查无错后,再接通线性集成一体电源的~220V外接电源。
提示:在连接传感器信号线的之前,务必切断传感器的外接电源后(亦即切断线性集成一体化电源的~220V外接电源)。
软件参数设置:
ⅰ运行JXCRAS V5.1应用程序,进入测试软件的主界面,;
ⅱ选择机械基础实验项目下的“曲柄滑块或曲柄摇杆机构曲柄转速的测定JX03”;
进入主窗口后,从左至右分别在菜单栏的“采样频率”,“程控放大”,“传感器参数”菜单项下,设置相应的测量参数;
ⅳ单击“稳态转速测量”菜单项,进行转速测量。
ⅴ测量完毕单击“退出”菜单项退出。
③ 转速的测量及计算
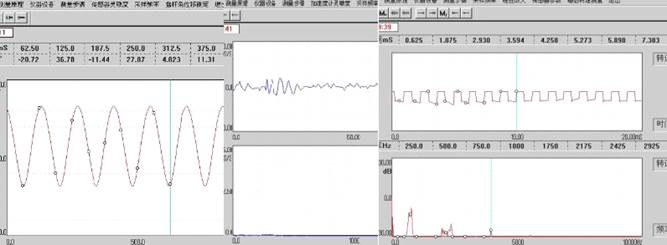
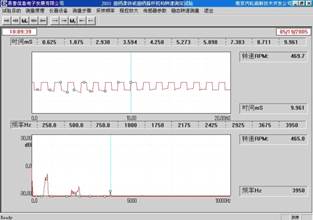
启动电动机,运行测量程序,测得旋转编码器发出的脉冲;利用工具栏上的‘前进’箭头按钮移动十字光标,测量出十个周期的数据;根据频率与时间周期的关系:f=1/T计算出曲柄的转速。
提示:在开动电机之前,必须将机构的安全罩卡死在桌面上的固定螺栓内,并检查有无机构运动干涉,注意安全问题(如 试验者安全、电线、信号线等)。
(2)位移测量
1)滑块的线位移测量
① 测量原理
实验使用直线位移传感器测量滑块的直线位移,直线位移传感器的外部引出线有四根,红色香蕉插头为电源的正极,两个黑色香蕉插头分别为电源零点和信号输出负,及信号输出线。使用时要将其电源线与直流电源的极性正确连接,信号线连接到AD44数据采集卡。
实验使用的两根直线位移传感器编号分别为:20010581T、20010582T、,对应的校正因子分别是:31.20mV/mm、32.225mV/mm。
② 测量步骤
硬件联接:
ⅰ将线位移传感器引出线中的红色香蕉插头、两黑色香蕉插头分别与直流电源的红色香蕉插座和两黑色香蕉插座对接。
ⅱ线位移传感器的信号线头与AD44数据采集卡上端的第一通道相连。
测试系统连接完毕,并检查无错后,再接通线性集成一体电源的~220V外接电源。
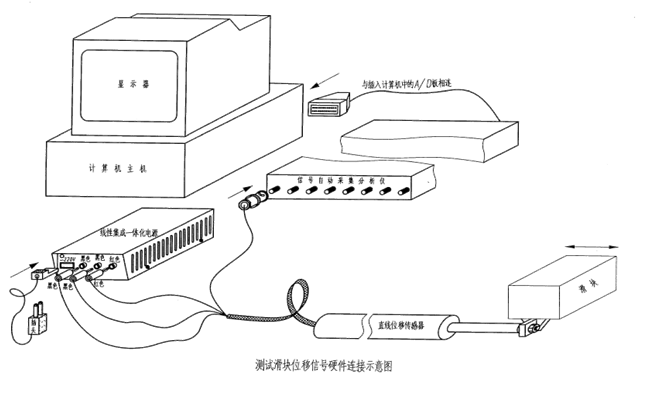
图2-6
软件参数设置:
ⅰ选择机械基础实验项目下的“曲柄滑块机构滑块线位移测定JX01”;
ⅱ在菜单栏的“传感器灵敏度”,“采样频率”菜单项下,设置相应的测量参数;
ⅲ单击“线位移测量”菜单项,进行滑块线测量。
ⅳ测量完毕单击“退出”菜单项退出该测量项目。
③ 滑块的位移测量
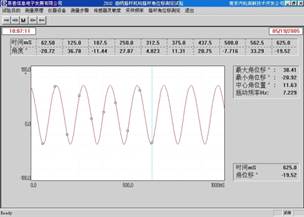
启动电动机,运行测量程序,测得滑块的位移曲线;利用工具栏上的‘前进’箭头按钮移动十字光标,测量出十个点的位移数据;
2)摇杆的角位移测量
① 测量原理
实验采用角位移传感器测量摇杆的角位移,角位移传感器输出一个与摇杆的角位移成比例的直流信号,该信号经角位移变送器后再送给计算机。角位移变送器外部引出线有两根,红色香蕉插座引出线为信号输出正,黑色香蕉插座引出线为信号输出负。在使用时要将其电源线与直流电源的极性正确连接,信号线头连接到AD44数据采集卡。
实验使用的两个角位移传感器编号分别为20010579T、20010580T,对应的校正因子分别是:73.405mV/度、70.968mV/度。
② 测量步骤
硬件联接:
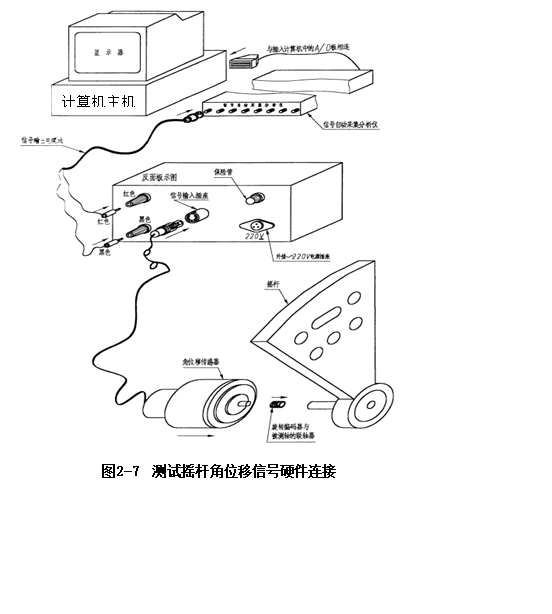 ⅰ将角位移传感器引出线中的红色香蕉插头、两黑色香蕉插头分别与直流电源的红色香蕉插座和两黑色香蕉插座对接。
ⅰ将角位移传感器引出线中的红色香蕉插头、两黑色香蕉插头分别与直流电源的红色香蕉插座和两黑色香蕉插座对接。
ⅱ角位移传感器的信号线头接到角位移变送器;
ⅲ将角位移变送器的输出端与AD44数据采集卡的第一通道相连。
ⅳ测试系统连接完毕,并检查无错后,再接通角位移传感器和角位移变送器的外接电源。
软件参数设置:
ⅰ双击机械基础实验项目下的“曲柄摇杆机构摇杆角位移测定JX02”;
ⅱ在菜单栏的“传感器灵敏度”,“采样频率”菜单项下,设置相应的测量参数;
ⅲ单击“摇杆角位移测定”菜单项,进行摇杆角位移测定测量。
ⅳ测量完毕单击“退出”菜单项退出。
③ 摇杆角位移测量
启动电动机,运行测量程序,测得摇杆的角位移曲线;利用工具栏上的‘前进’箭头按钮移动十字光标,测量出十个点的位移数据;
七、思考题
1.转速测量中选用不同的程控放大倍数对转速的测量有无影响?为什么?
2.对于曲柄滑块机构滑块实际线位移测量曲线,请指出实验台的参考坐标原点,并分析影响测量结果的因素有哪些?
3.对于曲柄摇杆机构摇杆实际角位移测量曲线,请指出实验台的参考坐标原点,并分析影响测量结果的因素有哪些?
4.改变采样频率,重新测量摇杆的角位移,测得的位移曲线是正弦曲线还是余弦曲线,为什么?
八、实验报告要求
1.实验报告格式自拟,做完实验后,按选定的实验格式及内容认真组织实验报告;
2.撰写实验报告要求思路清晰、语言通顺、公式引用准确、实验结果真实、不允许抄袭他人的数据,凡抄袭的一经查实,取消本次试验的成绩;
3.根据相关实验数据的计算分析,总结出相关的结论;
4.回答思考题。






